










[AI로봇 시대①] 강남거리 활보 중인 휴머노이드…카이스트 로봇 "계단도 척척"
등록 2025-10-11 08:00:00 최종수정 2025-10-13 10:10:59







카메라 없이 지형 '상상'하며 걷는 휴머노이드MIT도 제친 카이스트의 세계 1위 기술력 증명시속 12㎞ 달리며 30㎝ 계단 오르는 성능 구현
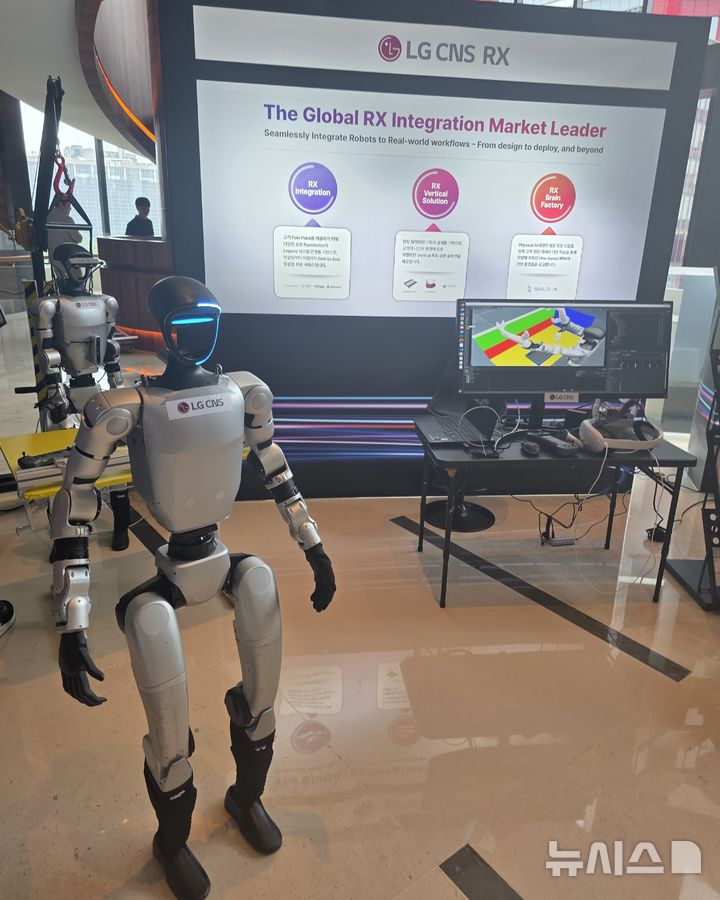
카이스트 명현 교수가 지난달 30일 LG CNS가 개최한 기업 고객 초청 행사 'AX 페어 2025' 기조연설에서 공개한 휴머노이드 로봇 영상의 한 장면이다. 이는 한국의 휴머노이드 로봇 기술이 실생활 적용 가능한 수준까지 발전했음을 보여준다. 명현 교수는 "휴머노이드 로봇의 상용화가 이제 멀지 않았다"며 "기존 엔지니어링 기술과 AI 기술의 융합을 통해 더 나은 미래를 만들어 나가야 한다"고 강조했다. ◆카메라 없이도 지형 '상상'하며 걷는다
이 기술의 장점은 시뮬레이터에서 모든 학습이 가능하다는 점이다. 다양한 실제 환경과 거의 가깝게 만든 가상환경에서 학습시키면, 1~2시간 정도만으로도 실제 환경에서 잘 작동한다. 연구팀은 4000개의 가상 로봇을 활용해 다양한 지형과 로봇 파라미터를 랜덤화해 학습시켰다. ◆MIT 완전히 꺾은 세계 최고 기술력…산업 현장 확산 가능
특히 2023년 영국에서 열린 ICRA 2023 사족 보행 로봇 챌린지(QRC)에서는 4배 이상의 점수 차이로 우승했다. 미국 MIT(매사추세츠공과대학교)와 이탈리아 기술연구소(IIT)팀이 2, 3위를 차지했다. MIT팀은 원격조종으로 인한 지연 문제를, IIT팀은 15년간 사족보행을 연구했음에도 고전적인 제어 방법의 한계를 드러냈다. 반면, 카이스트팀은 맹목 보행으로 빠른 대응이 가능했다. 공사 현장 SLAM 대회에서도 압도적 성과를 거뒀다. 5000평 규모의 공사 현장에서 0.28m 오차로 정확도를 구현해 2위팀(8m), 3위팀(9m)과 현격한 차이를 보였다.
박해원 교수팀이 창업한 디든로보틱스도 주목을 받는다. 자석 발과 자율주행 기술을 결합한 '승월 로봇'을 개발해 조선소의 철제 벽과 천장을 기어 다니며 작업할 수 있도록 했다. 사람이 접근하기 어려운 산업 현장에서 활용 가능한 실용적 기술이다. ◆완전체 휴머노이드 향한 '드림팀'…시속 14km, 사다리 타기 목표
목표는 무거운 물건 운반, 밸브와 문손잡이 조작, 수레를 밀면서 동시에 걷는 등 실제 산업 현장의 복잡한 요구에 대응하는 다재다능한 로봇 개발이다. 앞으로 주행 속도를 시속 14km까지 높이고, 40cm 이상 계단 오르기와 사다리 타기 등 한층 어려운 임무 수행 능력을 갖출 계획이다. ◎공감언론 뉴시스 [email protected]
Copyright © NEWSIS.COM, 무단 전재 및 재배포 금지
|